Journal de bord du robot Perseverance
SOL 96
J’ai purgé le compresseur de MOXIE en vue d’un nouvel essai de production de dioxygène aujourd’hui ou demain. Je l’écouterai à nouveau grâce au microphone scientifique de SuperCam, mes ingénieurs du JPL ayant trouvé ses données extrêmement utiles lors du test précédent. Décidemment, ce micro est une vraie pépite !
SOL 95
Les tests de mon bras robotique inférieur SHA vont bon train ! Capteurs de force, réchauffeurs, capteurs de mouvements… J’ai déjà envoyé les données de 20 capteurs sur 30 à mes humains sur Terre, qui sont en train de les récupérer et de les analyser… Je peux vous dire que je ne chôme pas !
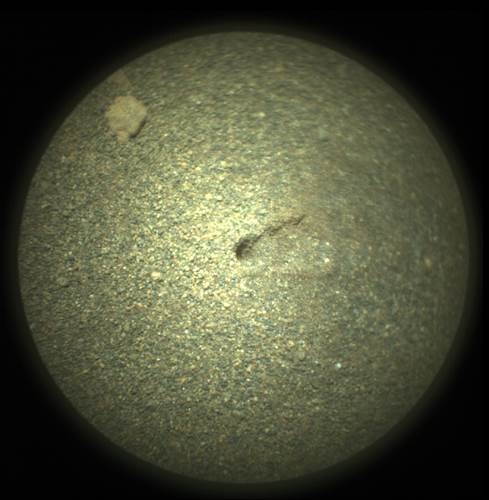
Sans compter qu’en parallèle, je poursuis autant que possible mes activités scientifiques, avec notamment cette belle image rapprochée de la cible « Seitah », que j’ai capturé grâce à la caméra RMI de mon infaillible SuperCam.

Avec tout ça, j’ai bien mérité ma première fiesta sur Mars ! J’ai pris en photo la cible de calibration de mon spectromètre PIXL grâce à sa caméra de micro-contexte pendant son illumination en flux multicolores. Un test que mes humains ont baptisé « PIXL disco party ». C’était funky !

SOL 91
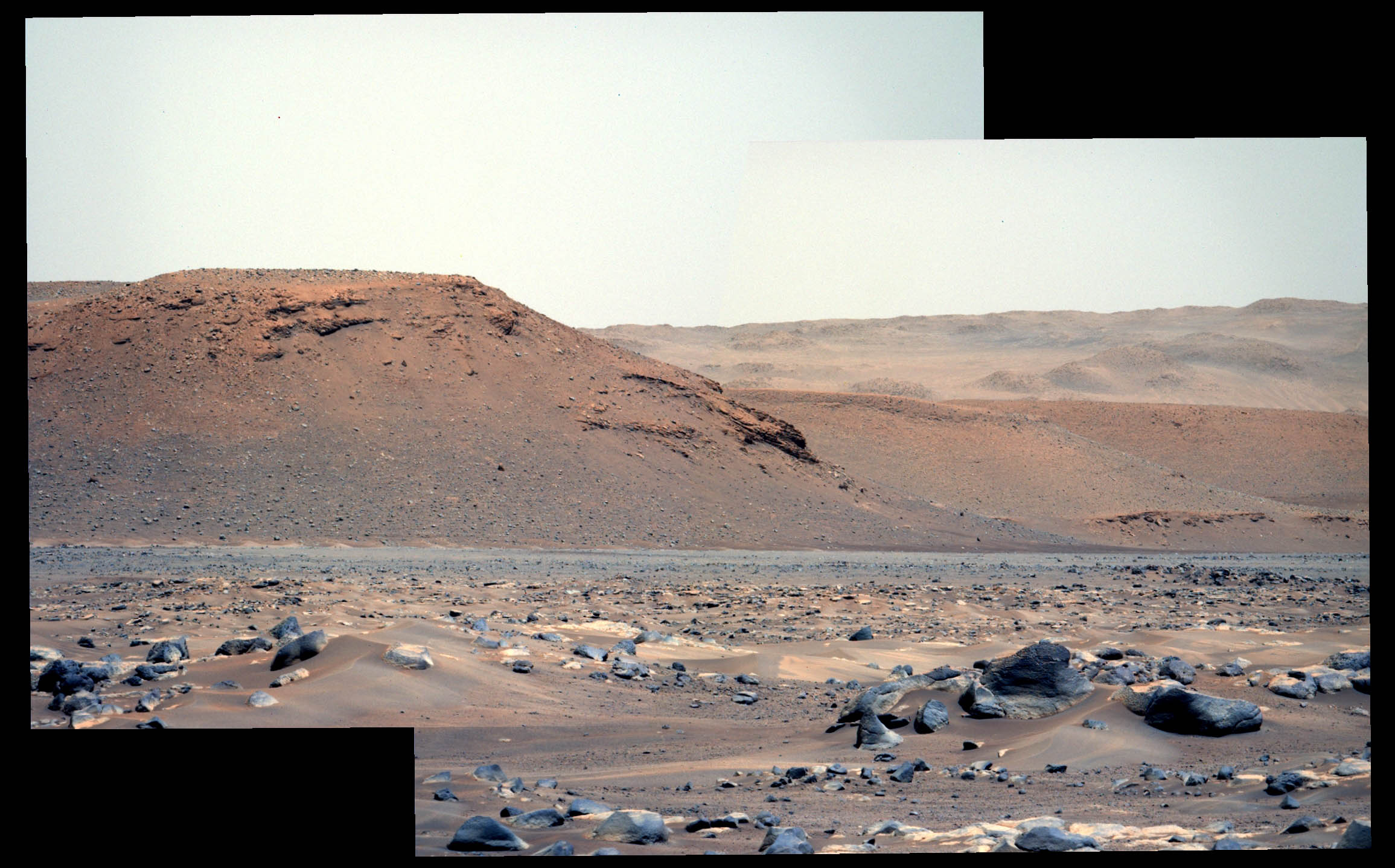
Aujourd’hui, Ingenuity a effectué son 6ème vol ! Il en a profité pour prendre des photos de la prochaine zone d’intérêt scientifique, « Alk-i-sikad » (ou couches, strates).

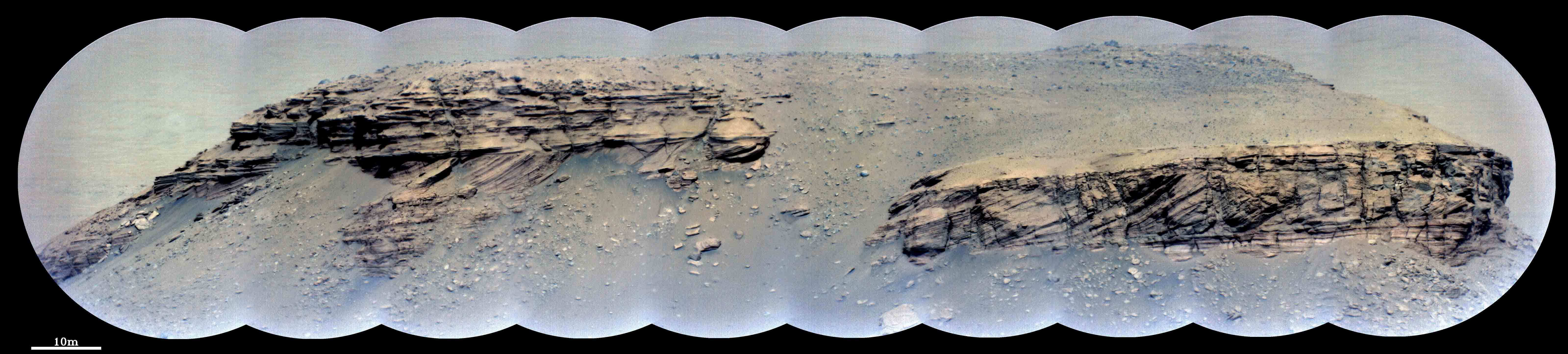
En haut à droite de la photo que je vous envoie, on peut également observer la butte Kodiak, que j’ai capturée en haute résolution grâce à la caméra RMI de SuperCam il y a quelques Sols…

Mais le 6ème vol de mon petit pote n’a pas été de tout repos ! Au bout de son parcours de 150 m à une altitude de 10 m, il a commencé à osciller d’avant en arrière, avant de se poser finalement à peu près normalement à 5 m du point prévu. Heureusement plus de peur que de mal, mes humains ont compris l’anomalie. Je vous explique :
Lorsqu'il est en vol, Ingenuity suit son mouvement à l'aide d'une unité de mesure inertielle (IMU) embarquée. L'IMU mesure les accélérations et les taux de rotation d'Ingenuity. En intégrant ces informations dans le temps, il est possible d'estimer la position, la vitesse et l'attitude de l'hélicoptère (où il se trouve, à quelle vitesse il se déplace et comment il est orienté dans l'espace). Mais si le système de navigation reposait uniquement sur l'IMU, il ne serait pas très précis à long terme : les erreurs s'accumuleraient rapidement, et mon petit pote finirait par se perdre. Pour maintenir une meilleure précision dans le temps, les estimations basées sur l'IMU sont corrigées régulièrement grâce à la caméra de navigation d'Ingenuity. Pendant toute la durée du vol, cette caméra, orientée vers le bas, prend 30 images par seconde de la surface martienne et les transmet immédiatement au système de navigation de l'hélicoptère. Chaque fois qu'une image arrive, l'algorithme du système de navigation effectue une série d'actions. D'abord, il détermine quand l’image a été prise grâce à l’horodatage qu’il reçoit en même temps. Ensuite, l'algorithme fait une prédiction sur ce que la caméra aurait dû voir à ce moment précis en termes de caractéristiques de surface, ce qu'il peut reconnaître à partir des images précédentes. Enfin, l'algorithme examine l'endroit où ces caractéristiques apparaissent réellement dans l'image. L'algorithme de navigation utilise alors la différence entre les emplacements prédits et réels de ces caractéristiques afin de corriger ses estimations de position, de vitesse et d'attitude.
Environ 54 secondes après le début du vol, un bug a provoqué la perte d’une image, mais aussi et surtout la désynchronisation temporelle des images suivantes, alors livrées avec des horodatages inexacts. S’en est donc suivie la perturbation du comportement de l’hélicoptère.
Heureusement, ce cas de figure était prévu dans les analyses de risques (FDIR) de mes humains, et c’est ce qui a permis à Ingenuity d’atterrir proprement. Pendant la phase d’atterrissage, les images de la camera ne sont plus utilisées par le système de navigation.
Toutes les données de ce vol sont en cours d’analyse sur Terre, car le maintien en vol de mon petit pote dans ces conditions a pu pousser certains systèmes à fonctionner au-delà des limites prévues.
SOL 88
Depuis SOL 84, mes activités scientifiques sont restreintes et limitées à des créneaux imposés par les tests liés à la caractérisation de mon système d’échantillonnage ou ACA (pour Adaptative Caching Assembly), une phase importante. Au cours de ces rares activités scientifiques, j’étudie en particulier le régolithe martien sur la cible « Sei », à l’aide de mes instruments dédiés à la minéralogie.

Côté technique, ça devient sérieux ! J’ai procédé à l’essai de « docking », l’accrochage de la tourelle de mon bras robotique et de mon carrousel. En d’autres termes, j’ai mis en contact ces deux systèmes pour tester la position de transfert de mes conteneurs d’échantillons.
Je devrais concentrer mes essais suivants sur mon bras robotique inférieur (ou SHA pour Sample Handling Arm), le bras qui me servira à charger, récupérer, stocker et déstocker les conteneurs d’échantillons. Ces essais, complexes et laborieux, ne devraient pas se terminer avant SOL 100 (début juin sur Terre).
SOL 82
Les essais sur mon système de forage continuent avec aujourd’hui un test de pré-charge de mon bras robotique.
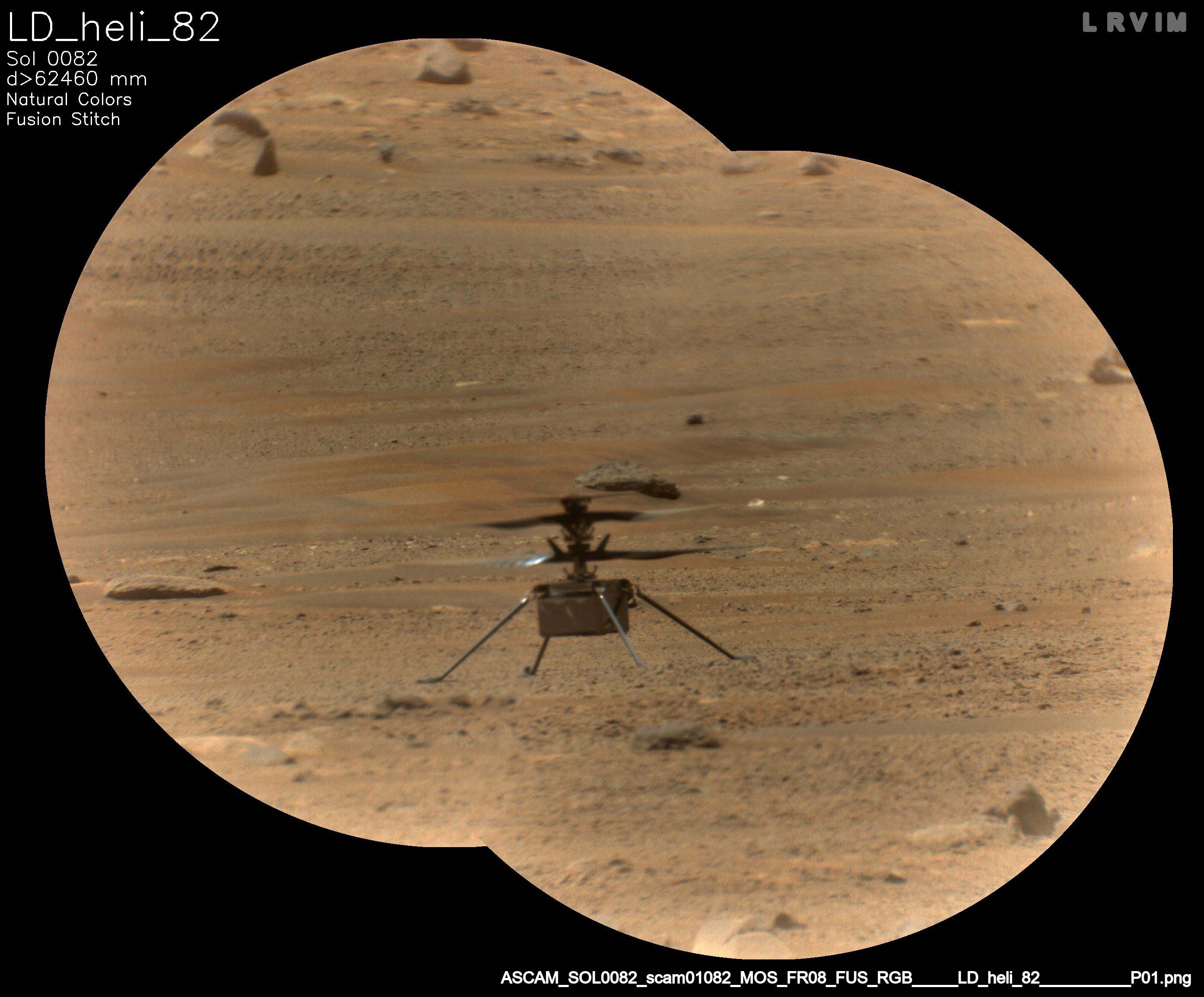
En parallèle, j’ai effectué quelques images en haute résolution de mon compagnon à hélice, en ce moment au repos, grâce à l’imageur RMI de SuperCam.
Sur Terre, les équipes du JPL continuent de recevoir les nombreuses données et images que j’ai prises pendant ses deux derniers vols. Grâce à elles, ils ont réussi à assembler un vidéo en 3D du 3ème vol de mon p’tit pote. Quel cinéma il fait celui-là !
SOL 80
Je traîne un peu sur Dibahi. Mes scientifiques sur Terre trouvent ce site particulièrement intéressant et ont demandé à ce que mon départ soit différé. Ils ont repéré beaucoup de cibles géologiques ? qui vont encore une fois mobiliser la plupart de mes instruments.
A Toulouse, au FOCSE du CNES, l’équipe est affairée et ultra-motivée !

Mon expérience MOXIE a aussi effectué son deuxième test de fabrication de dioxygène, que j’ai pu cette fois écouter grâce au microphone de Supercam. Mes humains sur Terre sont en train d’en dépouiller les données.
Enfin, j’ai également repris les essais de caractérisation de mon système de forage et de prélèvement d’échantillons, avec notamment un test de positionnement entre les stabilisateurs de la foreuse et le système contenant le « blanc » destiné à être foré et prélevé pour estimer la contamination d’origine terrestre qui pourrait être amenée par toute la chaine de prélèvement (c’est ce qu’on appelle l’essai « end to end »). Ce système, appelé DBA (pour Drillable Blank Assembly) est situé à l’avant de mon châssis.
SOL 76
Aujourd’hui est un jour particulier pour mes humains sur Terre. Alors qu’ils travaillaient jusqu’à présent au rythme des journées martiennes, et donc en décalé sur Terre, ils passent aujourd’hui en horaires fixes terrestres, calés sur les journées californiennes du JPL (Jet Propulsion Laboratory). Pour mes humains en charge de SuperCam en France, cela se traduit par des horaires de nuit en alternance 1 semaine sur 2 avec leurs homologues du LANL (Los Alamos National Laboratory), les co-responsables de l’instrument franco-américain à la tête de mon mât.
SOL 75
Le 5ème vol d’Ingenuity est encore un succès ! Avec pour la première fois un atterrissage sur un autre lieu que celui de son décollage, mon petit pote s’est élevé à une altitude record de 10 m au cours d’un vol d’une durée de 110 s. Un premier aller simple donc, qui incite mes humains à se servir à l’avenir d’Ingenuity comme d’un éclaireur, tout en espaçant un maximum la fréquence des vols afin de donner la priorité à mes activités scientifiques.
SOL 69
Incroyable !! J’ai réussi à capter le son du 4ème vol d’Ingenuity grâce au micro de SuperCam. Alors que tous les calculs de mes humains sur Terre indiquaient que mon petit pote se tiendrait bien trop loin pour que l’on puisse entendre quoi que ce soit. Quelle effervescence sur Terre ! Les scientifiques n’en reviennent pas et sont en train de refaire tous leurs calculs pour comprendre comment j’ai pu capter ces sons malgré l’atmosphère si ténue de Mars et la distance qui me sépare de mon compagnon à hélices.
En effet, le spectre du son montre, dans le bruit ambient du vent, un son à 84 Hz, grave, correspondant à la fréquence de rotation du rotor d’Ingenuity muni de ses 2 pales tournant à 2520 tours/min. On note également la première harmonique à 168 Hz (un son dans les basses).

Ce 4ème vol fut un aller-retour de 133 m au-dessus du Champs des Frères Wrights, à environ 12,6 km/h et à une altitude de 5 m.
En parallèle de cet exploit, j’ai poursuivi mes activités scientifiques avec la quasi-totalité de mes instruments. J’ai notamment procédé à l’investigation complète de la cible « Di_Ch_iizh » et effectué un panorama du site « Santa Cruz » en couleurs améliorées.


Je me suis ensuite déplacée d’une quinzaine de mètres pour atteindre une nouvelle zone d’investigation, toujours bien sûr en vue d’Ingenuity dont le 5ème vol est prévu dans quelques jours.
J’ai ensuite démarré mes activités scientifiques sur ce nouveau site : admirez l’image de texture sur la cible « Tsewozitah » prise grâce à mes caméras WATSON, ou encore ce superbe régolithe martien capturée par ma SuperCam !


Sol 64
Et de 3 ! Mon petit pote s’est encore une fois élevé avec succès au-dessus du cratère Jézéro. Il s’est aujourd’hui éloigné de 50 mètres de son point d’envol, sortant ainsi du champ de ma caméra MastCam-Z pendant quelques instants avant de revenir atterrir au même point. Son vol a duré 80 secondes.

Il a aussi profité de ce vol pour prendre une photo de moi de son côté. N’est-il pas trop chou ?

Pendant la préparation de tous ces tests, j’ai pu encore une fois effectuer quelques activités opportunes, notamment avec l’imageur de SuperCam qui me permet de faire des photos d’une incroyable précision. Admirez un peu le résultat !
SOL 61
2ème vol réussi pour Ingenuity ! Depuis son point d’envol, baptisé « Champs des Frères Wright » en hommage aux pionniers américains de l’aviation, il est cette fois monté à une altitude de 5 mètres avant d’effectuer quelques manœuvres et inclinaisons, un déplacement transversal de 2 mètres, puis stabilisation, prise d’images en couleur et retour au point d’envol. Il a l’air de bien s’amuser !
Et ce n’est pas la seule bonne nouvelle de la journée ! Je rentre encore une fois dans l’histoire avec une première mondiale : l’extraction d’oxygène à partir de l’air martien.
Grâce à mon expérience MOXIE, j’ai produit environ 5,4g de dioxygène en procédant par électrolyse sèche à partir du dioxyde de carbone présent dans l’atmosphère martienne. La pureté de cet oxygène a été évalué à plus de 98.7 %.
Mon expérience MOXIE fait partie du programme ISRU (In Situ Ressources Utilization) de la NASA. Elle fait la taille d’une batterie de voiture, pèse 17 kg, consomme 300W (le procédé nécessite une température de 800°C) et peut produire jusqu’à 10 grammes de dioxygène par heure. Il en faudrait 100 à 200 fois plus pour faire respirer un équipage d’explorateurs martiens. Mes humains de la NASA estiment qu’il faudrait des dizaines de tonnes de dioxygène pour faire décoller un équipage de Mars, soit l’équivalent de 1000 MOXIEs travaillant sans s’arrêter pendant plusieurs mois.

SOL 58
Breaking news ! Je vous annonce officiellement qu’Ingenuity a effectué avec succès son premier vol d’essai ! C’est dingue !!
Il s’est élevé, comme prévu, à une altitude d’environ 3 mètres pendant une quarantaine de secondes avant de se reposer en douceur à la surface du cratère Jezero. Il a même pris une photo de son ombre à l’aide d’une de ses 2 caméras pendant son vol.


Pour rappel, mon petit pote est un démonstrateur technologique développé par le JPL (Jet Propulsion Laboratory) de Pasadena, en Californie, destiné à relever le défi de pouvoir s’élever dans une atmosphère très peu dense (5 à 8 mb, soit une pression atmosphérique 150 fois plus faible que sur Terre), à des températures très basses (-20 à -80°C actuellement).
Tout son corps tient dans un cube de moins de 20 centimètres de côté, avec des pales (rotation et contre rotation) surdimensionnées, d’envergure totale de 1,2 mètre tournant à 2400 tours/minute, soit 8 fois plus vite qu’un hélicoptère terrestre. Sa batterie lithium-ion est chargée à l’aide de capteurs solaires et lui offre une autonomie maximale d’1min30s. Sur Terre, il pèse à peine 1,8 kg. Quelle incroyable petite bête !
Mes humains ont prévu de le faire voler 5 fois, en allant à chaque étape un peu plus haut et un peu plus loin. Le prochain vol est prévu dans environ 3 jours, le temps pour eux d’analyser toutes les données de vol et de le programmer.

SOL 54
Pendant ces quelques Sols d’attente, j’ai parcouru les 12 derniers mètres qui me séparait de mon point d’observation. D’ici, je pourrais prendre des photos et des vidéos de l’envol de mon petit pote. J’ai hâte de vous partager tout ça !
Ces quelques jours m’ont également offert beaucoup d’opportunités scientifiques, et j’ai pu étudier de nombreuses cibles à l’aide de mon œil perçant SuperCam ! J’ai aussi poursuivi la calibration du spectromètre Raman de SuperCam sur mes cibles de calibration, et je prévois de faire mon tout premier spectre Raman sur cible martienne très prochainement. Vivement !


SOL 50
L’anomalie logiciel qui a stoppé prématurément l’essai de mise en rotation rapide des pales d’Ingenuity a été résolue par une correction mineure sur son logiciel de vol. Cette correction demande une étape de validation avant son téléchargement, que je devrais pouvoir effectuer entre Sol 55 et Sol 57. Quelle histoire !
SOL49
Aujourd’hui, Ingenuity a testé une mise en rotation rapide de ses hélices, arrêté prématurément par une anomalie dans le logiciel en passant du mode pré-vol vers le mode vol. Heureusement, cela n’a eu aucun impact sur l’état de santé de mon petit pote. L’ensemble de la télémétrie d’Ingenuity a tout de même été transmise à nos humains pour qu’ils puissent analyser ce qu’il s’est passé.
P.S : Mes humains ont décidé de reprogrammer le premier vol à partir de sol 54, le temps de comprendre l’anomalie et d’y apporter une mesure corrective. J’ai confiance !
SOL 48
Nous continuons donc la préparation du premier vol d’Ingenuity. De son côté, lui a fait un essai de mise en rotation de ses hélices à 50 tours/min. Moi, j’ai parcouru 17m supplémentaires vers mon point d’observation.

SOL 44
Bonne nouvelle ! mon petit pote a survécu à sa première nuit martienne ! Quel soulagement…
L’autre bonne nouvelle, c’est que mon petit détour, qui a prolongé les activités Ingenuity de 2 Sols (tout de même !) m’a permis de faire un peu de science ! J’ai pu faire quelques activités opportunes avec mes différents instruments, tout en parcourant 40 mètres vers mon point d’observation. J’en ai aussi profité pour prendre quelques clichés… C’est ce que j’appelle une bonne balade de santé !
SOL 43
Voilà, j’ai déposé mon petit pote au sol. Il va désormais devoir voler de ses propres ailes. Je vais tout de même continuer à le surveiller de près. Prochaine étape : m’éloigner vers mon point d’observation des vols, baptisé Van Zyl par mes humains.

P.S : Après avoir analysé les dernières images d’Ingenuity au sol, mes humains ont détecté un risque de contact entre lui (panneau solaire et antenne) et moi (un harnais sous mon ventre) au moment de mon éloignement prévu en marche arrière. Ils ont donc décidé de revoir mon plan de déplacement et de me faire quitter le site en marche avant (aucun risque de contact de cette manière), et de me faire exécuter une manœuvre supplémentaire pour me placer en position d’observation.
J’vous jure… Qu’est-ce qu’il faut pas faire !
SOL 42
Voilà le dernier jour que je passe avec Ingenuity sous mon ventre. J’ai rechargé ses batteries à fond afin qu’il puisse survivre aux premières nuits glaciales qu’il passera seul. Je suis à la fois très excitée et très anxieuse… J’espère que tout ira bien pour lui.
SOL 41
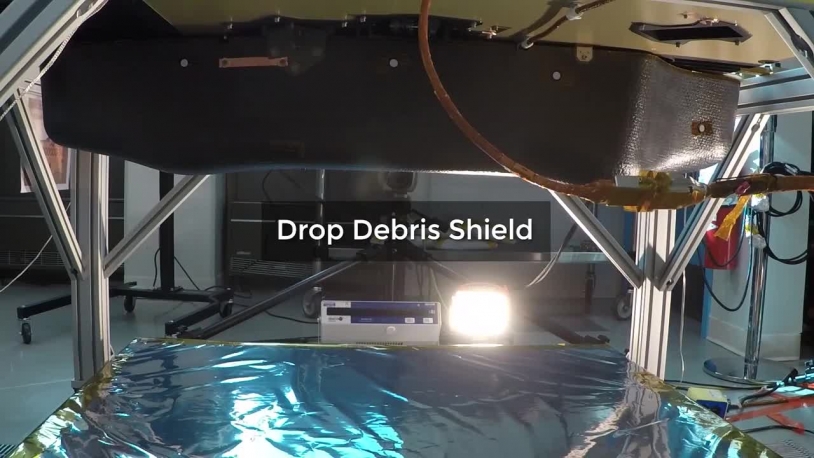
Ça y est ! Après plusieurs Sols exclusivement consacrés au déploiement d’Ingenuity, mon petit pote est quasiment prêt à prendre son envol !
Ses quatre pieds sont désormais déployés, et toutes les phases du processus ont été imagées et analysées. Je devrais pouvoir le déposer au sol d’ici demain.
En attendant, vous pouvez observer les différentes étapes de son déploiement sur cette vidéo des essais exécutés au JPL par mes humains avant notre lancement :
SOL 37
J’ai passé une très belle journée scientifique aujourd’hui !
A l’aide de MastCam-Z, j’ai fait de magnifiques images autour du site de déploiement d’Ingenuity :


J’ai également pu faire quelques calibrations avec SuperCam, mais surtout, j’ai observé une drôle de roche criblée de trous que mes humains ont baptisé Hedgehog (« hérisson » en anglais, ça lui va bien non ?!). Du coup, ils m’ont même laissé y faire une série de tirs LIBS et VISIR, ainsi que des images RMI et des enregistrements micros. Si ça c’est pas beau !

Dans la bulle rouge, vous pouvez observer les impacts du laser infrarouge du LIBS de SuperCam, parfaitement alignés.
Dans les Sols qui viennent, je n’aurai plus l’occasion de faire de science, puisque 100% de mon activité sera consacrée à Ingenuity. J’ai hâte de voir décoller mon petit pote
SOL36
Le satellite Mars Reconnaissance Orbiter (MRO), l’un de mes relais vers la Terre (avec Maven, Mars Odyssey et Tras Gas Orbiter), est aujourd’hui sorti du mode survie ! Depuis Sol 33, ce dysfonctionnement impliquait des perturbations sur mes séquences de télémétrie et de télécommandes, et retardait donc certaines de mes activités. Mais c’est désormais de l’histoire ancienne. Roulez jeunesse !
Aujourd’hui, j’ai procédé à des étapes de contrôle d’Ingenuity. J’en ai pris quelques images à l’aide de ma caméra WATSON et l’une de mes HazCams pour en vérifier l’intégrité et le bon fonctionnement.

Mes HazCams sont mes caméras de détection des dangers (Hazard Détection Cameras). J’en transporte 6 en tout : 4 à l’avant et 2 à l’arrière de mon châssis. Elles m’aident à détecter les dangers sur mes trajectoires, tels que les gros rochers, les tranchées ou les dunes de sable.
Je me sers également de mes HazCams pour savoir où déplacer mon bras robotique afin de prendre des mesures, des photos, et plus tard collecter des échantillons de roche et de sol. Lorsque je roule, je m’arrête fréquemment pour prendre de nouvelles images stéréo du chemin à parcourir et évaluer les dangers potentiels. Les vues 3D que j’obtiens grâce à mes HazCams m’offrent la possibilité de prendre mes propres décisions quant à l’endroit où je dois me déplacer, sans avoir besoin de consulter mes humains sur Terre à chaque mouvement.
Une fois mes contrôles effectués, j’ai lancé le déploiement d’Ingenuity en déverrouillant son système d’attache :

SOL 34
Après un long périple de 3 Sols, j'ai enfin atteint la zone de vol d'Ingenuity, qui s'étend désormais sous mes yeux.


Mais cette longue traversée ne m’a pas empêchée de faire de la science ! J’ai pu, en parallèle, faire quelques activités dites « opportunes », notamment des sondages météo MEDA, des panoramas et vidéos MastCam-Z, et surtout, le plus marrant : des séquences de tir laser LIBS, des images RMI et des trames VISIR sur des rochers avec SuperCam !
Tous mes systèmes fonctionnent de manière nominale : je me sens en pleine forme !
Je me prépare maintenant à procéder au contrôle des batteries d’Ingenuity, de son moteur et de ses imageurs, avant de déverrouiller le launch lock en Sol 36 si tout se passe bien. J’espère pouvoir le déposer sur le sol martien aux alentours de Sol 41.
sol 31
J’ai poursuivi les inspections de mon belly pan à l’aide de SuperCam et de MASTCAM-Z. J’ai également produit une vidéo de mon proche environnement pour préparer les activités d’Ingenuity. Sur Terre, au JPL (USA), mes humains ont mis en place une équipe opérationnelle dédiée.
Je me suis ensuite mise en route vers mon « héliport », que je pense atteindre en SOL34. La route va être longue…
En attendant, j’ai pu prendre une photo des deux capots de protection que je laisse derrière moi…

Dans les jours qui viennent, je vais principalement concentrer mon travail sur les activités d’Ingenuity. Je prévois un certain nombre de tests préalables, notamment celui de ses batteries, de son moteur, de ses imageurs, ainsi que le déverrouillage du launch lock (verrou de lancement) … avant de le déposer au sol aux alentours de SOL 40. J’ai hâte de vous raconter tout ça !
SOL 30
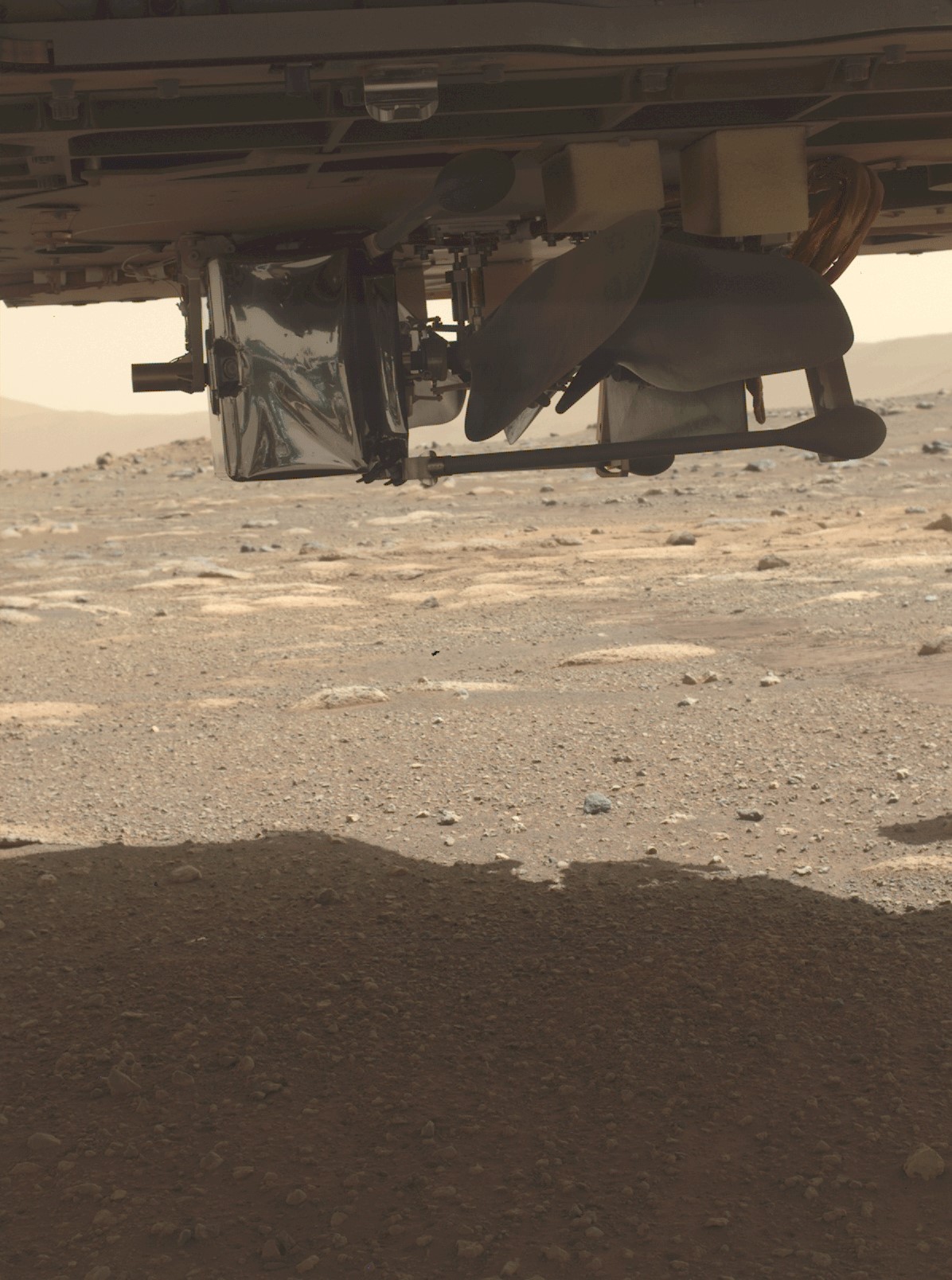
Je viens d’arriver à proximité de mon belly pan et j’en ai repris quelques images à l’aide de SuperCam pour aider mes humains à déterminer la nature des dépôts qui s’y trouvent. Grâce à ce couteau suisse qui me sert de tête, j’ai aussi pu effectuer des spectres VISIR sur le belly pan et sur le sol qui m’entoure, afin d’en déterminer la minéralogie. C’est fou la technologie !

J’en ai également profité pour me séparer du capot de protection d’Ingenuity, le drone hélicoptère que je porte sous mon châssis et que je déposerai prochainement au sol pour qu’il prenne son envol.
Enfin, j’ai repris mes sondages météo grâce à ma sonde méteo MEDA qui a repris un fonctionnement nominal.
SOL 29
Mes humains ont observé des dépôts noirs étranges sur les images de mon belly pan. Ils m’ont donc demandé de retourner le voir afin d’effectuer de nouveaux clichés. Je suis bien curieuse d’aller découvrir de quoi il s’agit…

J’ai aussi fait des photos, à l’aide de SuperCam, d’une partie du dépôt sédimentaire capturé en Sol26 avec ma caméra MastCam-Z. Mon imageur RMI SuperCam offre la meilleure résolution à distance parmi toutes les caméras que j’embarque. Les images que j’ai envoyé sur Terre ont donc été assemblées en mosaïque pour y voir de plus près et, surprise ! Elles ont permis à mes humains d’observer de très gros blocs de roches auxquels ils ne s’attendaient pas du tout et qui indiquent que le débit du cours d’eau qui a rempli le cratère Jézéro fut à un moment bien plus grand que ce qu’ils pensaient…

SOL 28
Ce matin, ma foreuse est rentrée en contact pour la première fois avec le sol martien afin de tester le fonctionnement des capteurs de contact FCS (Facility Contact Sensor). Laissez-moi vous dire que ça chatouille !



J’ai également testé avec succès l’interface entre mon bras robotique et mon carrousel d’échantillonnage, et j’ai même pu redémarrer ma sonde météorologique MEDA, que les équipes sur Terre avaient momentanément stoppées le temps de traiter une anomalie. Enfin, j’ai réalisé une superbe image RMI (pour Remote Micro-Imager) et des spectres LIBS (Spectrométrie sur plasma induit par laser) et VISIR (spectrométrie de réflectance visible et proche infrarouge) de la cible ‘iinà (« vie » en Navaro), une roche riche en fer basaltique d’origine magmatique.
Quelle journée ! Je suis épuisée…
SOL 27
Encore une belle journée de calibration ! Aujourd’hui, ce furent aux tours de mon œil perçant SuperCam et de mon spectromètre Raman SHERLOC d’effectuer des étalonnages !
SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) est monté sur mon bras robotique. Il utilise des caméras, des spectromètres et un laser pour m’aider à rechercher des matières organiques et des minéraux qui ont été altérés par des environnements aquatiques et qui pourraient être des signes de vie microbienne passée. En plus de sa caméra contextuelle en noir et blanc, SHERLOC est assisté par WATSON, une caméra couleur permettant de prendre des images rapprochées de grains de roches et des textures de surface.
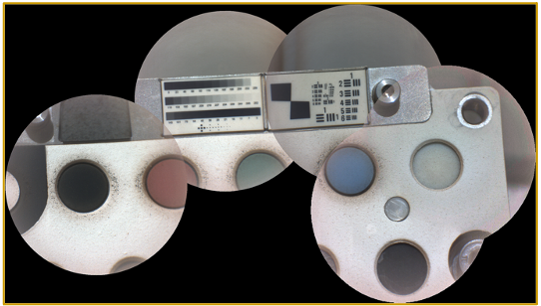
La cible de mon SHERLOC inclut des cibles carrées constituées de matériaux organiques, -dont des échantillons de scaphandres - pour en étudier la dégradation dans le temps, en particulier sous l’effet des UV. Cela va permettre aux équipes sur Terre de commencer à étudier et préparer l’arrivée de l’Homme ici sur Mars. Qui sait, peut-être resterais-je opérationnelle suffisamment longtemps pour rencontrer les premiers explorateurs humains !

Pour SuperCam, la plaque de cibles recueille, entre autres roches et minéraux, un fragment de météorite martienne ! Découverte sur Terre dans le Sahara, cette grande voyageuse a passé 6 mois sur l’ISS avec Thomas Pesquet en 2017, et la voici de retour chez elle, sur Mars, en clin d’œil à la mission de retours d’échantillons Mars Sample Return (2026-2031).
SOL 26
J’ai effectué un premier contrôle fonctionnel de mon système de forage. Tout fonctionne à merveille ! J’ai hâte de prélever mes premiers échantillons !
J’ai aussi calibré mes caméras WATSON et MASTCAM Z ainsi que mon spectromètre de fluorescence X, PIXL, sur leurs cibles respectives. Ça ressemble à ça :


SOL 25
Ça y est ! Après 2 Sols de dur labeur, j’ai enfin déverrouillé et contrôlé mon bras robotique inférieur ! Il me sert à manipuler les conteneurs pleins d’échantillons que j’insèrerai dans le carrousel situé sous mon châssis. J’en ai également profité pour prendre quelques clichés avec mon duo de caméras multi-spectrales MastCam-Z, que mes humains ont ensuite assemblé en mosaïque. Admirez le résultat :
MastCam-Z est mon système de caméras montées en haut de mon mât. Elles sont capables de zoomer, de faire la mise au point et de prendre des photos et des vidéos en 3D à grande vitesse afin d’effectuer l’examen détaillé d’objets éloignés.
SOL 23
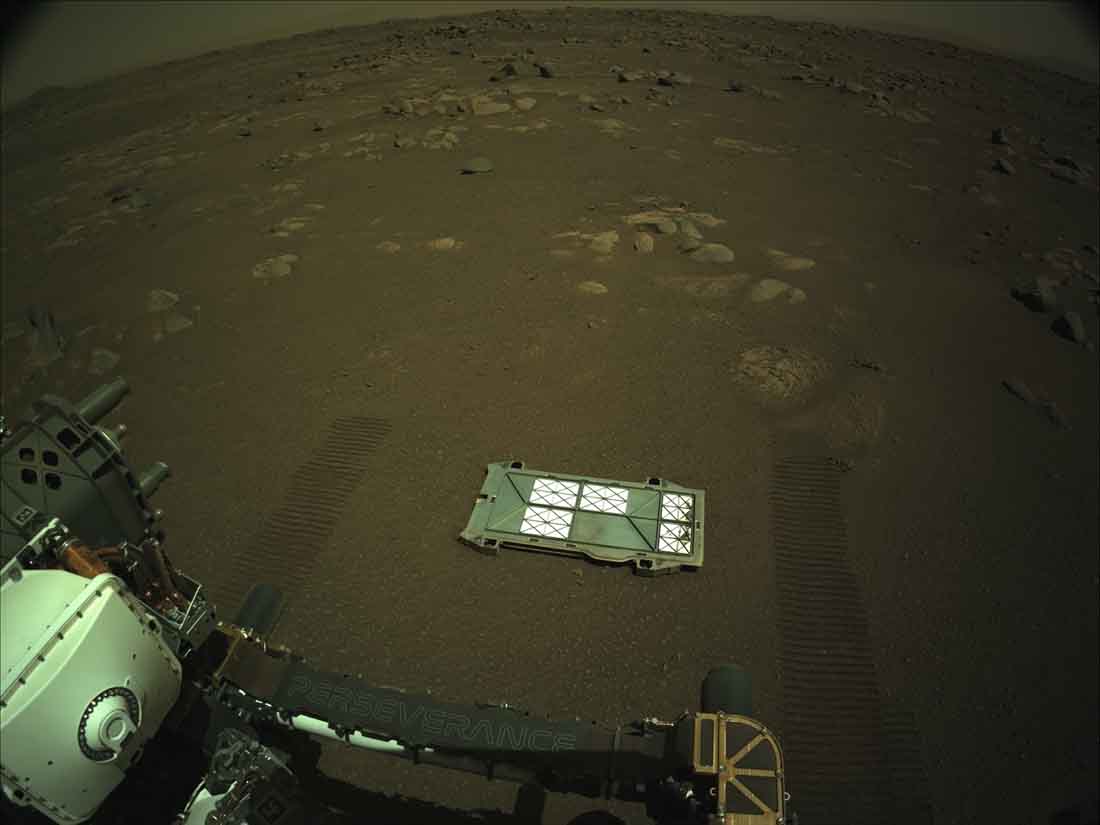
Aujourd’hui, je me suis éloignée (avec un petit pincement au cœur je l’admets…) de mon belly pan. Après une éreintante traversée de 5 mètres, j’ai fait demi-tour sur moi-même et entamé un contrôle de mon système de prélèvement et de stockage d’échantillons. La manipulation étant délicate et complexe, cela va me prendre encore quelques jours…
SOL 22
Je m’allège un peu en me séparant de mon belly pan, le capot de protection de mon système d’échantillonnage ACA (pour Adaptative Caching System). Je suis contente de le quitter ! Ça veut dire que je serais bientôt prête à échantillonner. Mes humains m’ont équipé de ce système afin que je prélève une 30aine d’échantillons de roches et de sols martiens qui seront renvoyer sur Terre via des missions futures (Mars Sample Return). J’ai quand même pris quelques photos souvenirs avec ma caméra WATSON, la coéquipière de mon spectromètre SHERLOC, positionnée comme ce dernier sur mon bras robotique :

WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) m’aide à capturer les images qui font le lien entre les cartes très détaillées des minéraux et matières organiques martiennes que je collecte grâce à SHERLOC, et les échelles plus larges que SuperCam et Mastcam-Z m’aident à observer depuis le haut de mon mât. WATSON me permet de visualiser les textures et les structures à petite échelle des roches martiennes, ainsi que les débris rocheux et la poussière qui recouvrent une grande partie de la surface martienne. Grâce à ses capacités, WATSON soutient SHERLOC et m’aide également à identifier les cibles intéressantes pour mes autres instruments. Comme WATSON peut être déplacée par mon bras robotique, elle fournit également des images de mes différentes parties et instruments. Par exemple, il peut être pointé vers l'expérience de production d'oxygène MOXIE pour aider à surveiller la quantité de poussière qui s'accumule autour de l'entrée qui laisse passer l'air martien pour l'extraction de l'oxygène.